Continuous Control with Deep Reinforcement Learning
WHY?
DQN은 각 상황과 행동에 대한 가치를 평가하는 함수인 Q function을 근사하여 이에 따라 때문에 action space가 discrete할 수 밖에 없다.
WHAT?
Policy gradient는 neural net을 통하여 policy 자체를 평가하는 방법이다. policy를 평가하는 기준은 1) 그 policy대로 행동했을 때 예상되는 미래의 모든 가치들을 감가상각한 첫 상황의 가치(episodic) 혹은 2) 각 상황의 평균 가치(continuous)이다.
J = E_{r_i, s_i ~ E, a_i \pi}[R_1]
이 목적식에 대한 gradient는 다음과 같다.
\nabla_{\theta^\mu} \approx E_{s_t ~ \rho}[\nabla_{\theta^\mu} Q(s,a|\theta^Q)|_{s=s_t, a=\mu(s_t|\theta^\mu)}]
= E_{s_t ~ \rho}[\nabla_{a} Q(s,a|\theta^Q)|_{s=s_t, a=\mu(s_t)}\nabla_{\theta_\mu} \mu(s|\theta^\mu)|_{s=s_t}]
이 gradient를 구하기 위해서 action value function을 근사해야 한다. 여기서 action value function이 policy를 평가하기 때문에 critic, policy네트워크는 actor처럼 작용하여 actor-critic model이라고 불린다.
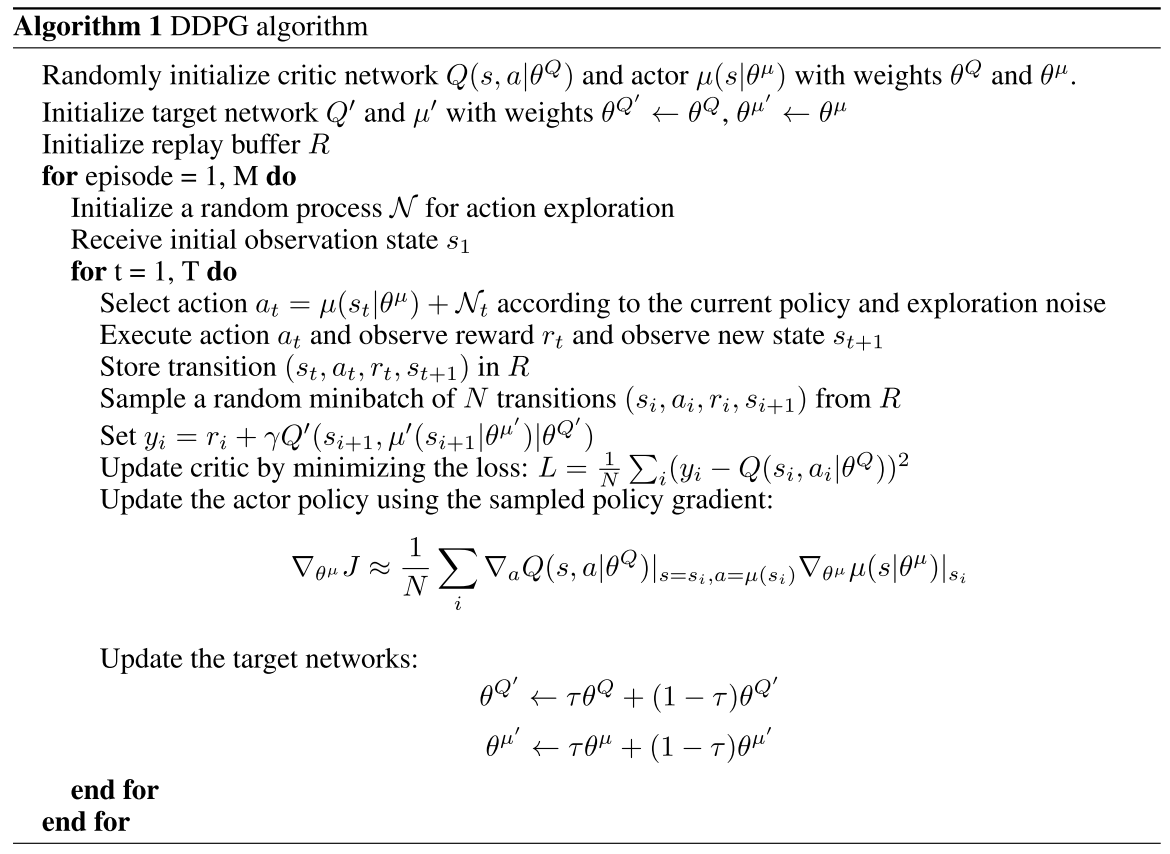
이 논문에서는 이 actor critic algorithm을 적절하게 수렴시키기 위하여 여러가지 트릭을 사용하였다. Exploration을 위하여 action의 결과에 noise를 더하였다. 또한 DQN과 마찬가지로 q function을 approximate하기 위하여 target network를 만들고 천천히 변화시켰다. 그리고 Experience replay를 만들고 거기서 추출하여 학습함으로서 학습데이터 간의 correlation을 감소시켰다. 알고리즘은 다음과 같다.
So?
로봇의 관절들과 같이 여러 action이 한번에 이루어 져야 하는 것과 같은 task에서 좋은 성과를 거두었다.

Rejoice in what you learn and spray it!