Model-Free Episodic Control
WHY?
인간은 어떤 환경에서 한번 보상을 보게 되면 그에 대해 빠르게 학습한다. DQN은 환경을 학습하기 위하여 그 상태와 행동의 가치를 근사하지만 환경 전체를 알기 위해서는 아주 오래걸린다.
WHAT?
Model-free Episodic Control에서는 한번 보상을 얻으면 그 경험을 적극적으로 활용한다. 이는 환경이 deterministic하고 exploration보다 exploitation이 더 중요한 미로와 같은 환경에서 적합하다.
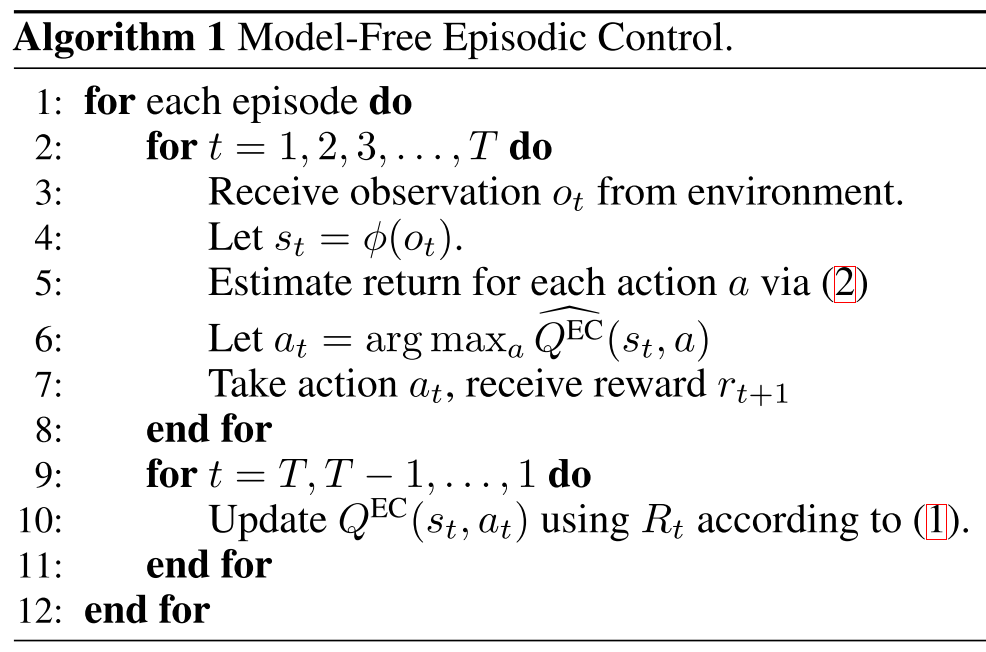
한 에피소드가 끝나고 보상을 얻고나서 그 에피소드에서 거쳤던 모든 상태와 행동의 값인 Q^{EC}(s_t, a_t)를 discount된 보상값으로 업데이트 한다. 만약 기존 값이 있다면 기존 값과 새 값을 비교하여 큰 값을 넣는다. 이러한 업데이트 방법에서는 모든 상태와 행동을 모두 거쳐야 하기 때문에 공백이 많아질 수 있다. 그렇기 때문에 각 스텝에서 행동을 결정할 때 그 값이 존재하지 않는다면 그 상태와 가장 유사한 k개의 값들을 평균해서 사용한다. 이를 \hat{Q^{EC}}(s, a)로 표현한다. 상태의 차원이 높다면 유사한 차원을 찾는데 시간이 오래 걸리므로 차원을 축소하는 random matrix를 곱하거나 vae를 사용하여 상태를 축소한다. 알고리즘은 다음과 같다.
So?
이를 통하여 deterministic한 환경에서 아주 빠르고 효율적으로 학습하여 좋은 성과를 거두었다.
Blundell, Charles, et al. “Model-free episodic control.” arXiv preprint arXiv:1606.04460 (2016).

Rejoice in what you learn and spray it!